Maken van een hijskraan met automatische horizontale en vertikale beweging.
Hijskraan laadt en lost een kabelhaspel van een binnenvaartschip naar een open wagon en andersom geheel automatisch d.m.v. een Arduino Nano processor. Dus alleen de horizontale beweging van de kraan en het op en neer bewegen van de haspel. Niet het wisselen van de haspel door een andere.
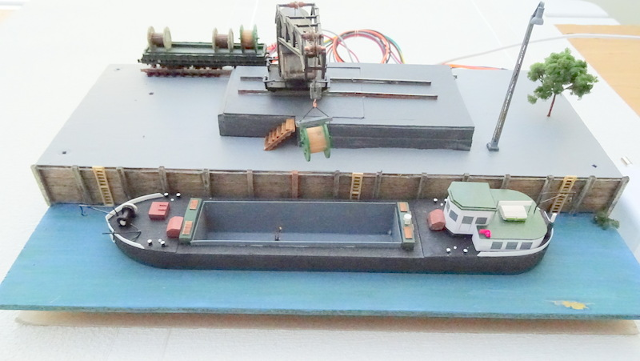
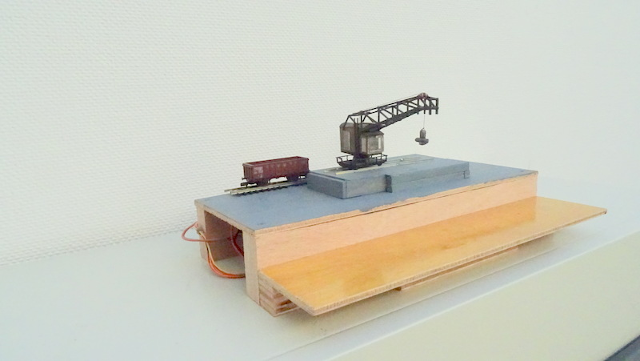
De hijskraan met een wagon op een module.
Op de verlaging komt later het binnenvaartschip. Aan de haak zit nog geen haspel wel wat lood om om aan de haak gewicht te geven voor een soepele op en neer gaan.
Voor een soepele hijsgang heb ik de kraan voorzien van twee extra loopwieltjes.
Ook heb ik twee LED's gemonteerd, één als cabine verlichting en de andere als schijnwerper aan de buitenkant. Tevens zit in de cabine een kraanmachinist.
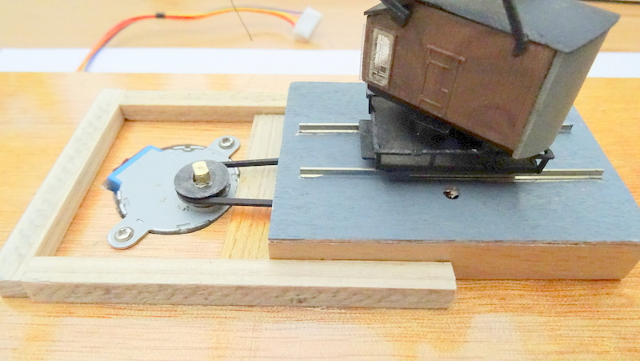
Het draaien van de kraan geschiedt d.m.v. een rubberen band. Dit om de kraan in de juiste positie te kunnen zetten.
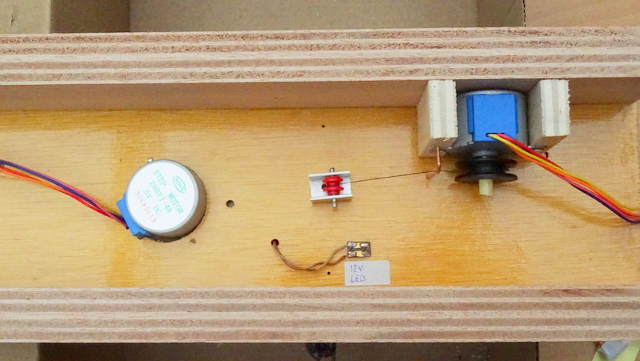
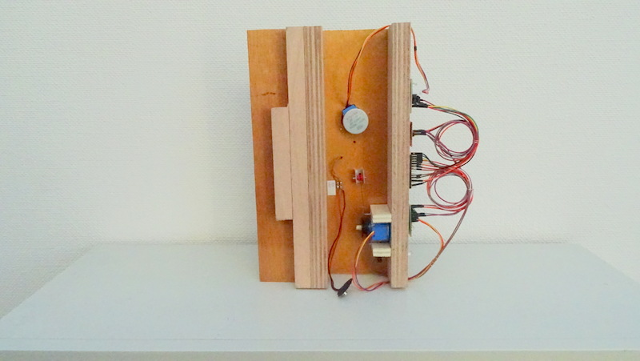
Op deze foto zijn de twee steppermotoren te zien, één voor het draaien van de kraan (links) en één voor het hijsen van de katrol (rechts). Ook is te zien de aansluitdraden van de twee LED's (midden).
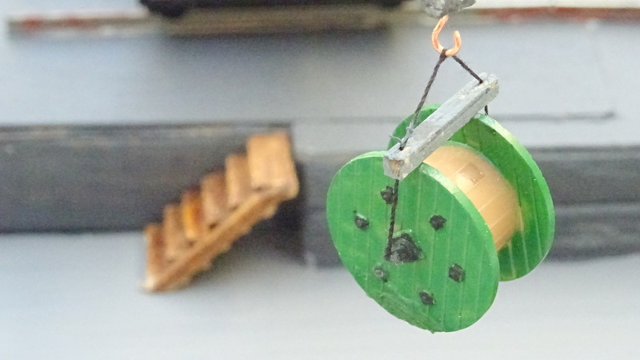
Op deze wijze wordt de kabelhaspel aan de trekhaak bevestigd. Je kunt natuurlijk ook voor anderen lasten kiezen b.v. planken of boomstammen. De haspel is verzwaard met stukje lood.
De kraan rijdt fictief op rails.
Op deze foto is het binnvaartschip te zien met personeel die aanwijzigen geeft aan de kraanmachinist.
De Arduino en stepperdrivers heb ik voor het gemak aan de achterzijde van de module gemonteerd. De aansluit kabels zijn jumper wires via www.aliexpress.com te verkrijgen.
webdesign Ruud de Veld
klik op de youtube knop voor een videopresentatie.
Klik na de presentatie op de terug < toets in de browser om weer terug te keren naar deze pagina.
Veel succes met de bouw.

De aansluitgegevens en de sketch van de Arduino Nano kunnen als PDF worden gedownload middels de DOWNLOAD pagina van deze site. Zie nummer 12.
Hijskraan pagina